Arduino C++
Python
PID Control
Ultrasonic Sensors
Bluetooth
Sensor Fusion
Gripper Design
3D Printing
SAE Level 2 Automation
⏱ Completed in 4 min 18 sec — within the 5-minute limit
Overview
Navigate, Locate, Pick Up & Deliver
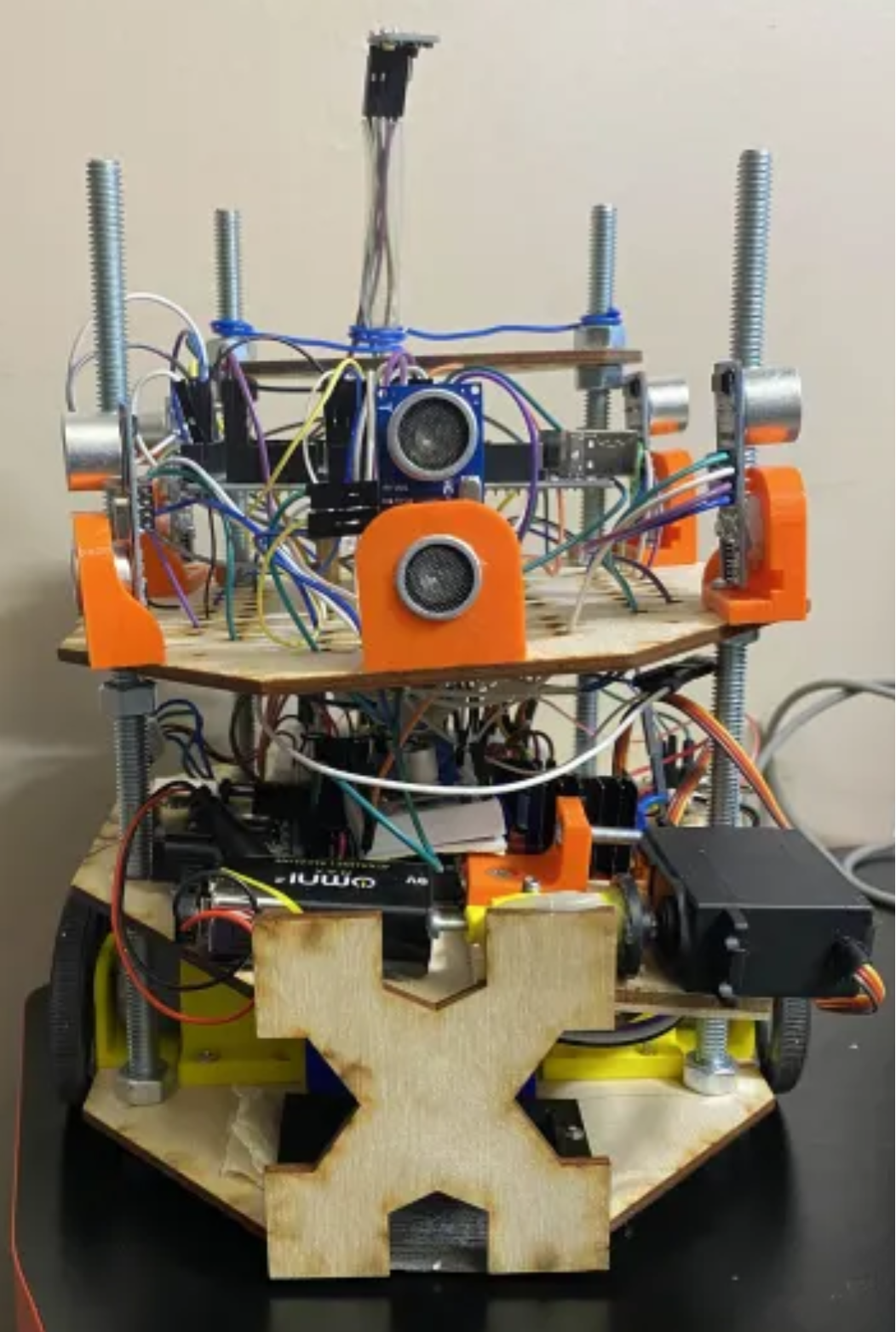
A compact rover designed for a capstone challenge requiring it to navigate a predefined maze
while meeting strict constraints on size, weight, cost, and functionality.
The robot had to avoid obstacles, localize itself anywhere in the maze, pick up a block from
a loading zone, and deliver it to a drop-off point — operating at
SAE Level 2 driving automation.
Challenges Faced
- Unreliable ultrasonic readings at angled walls
- Motor bias causing drift in straight-line motion
- Power limitations across combined subsystems
- Stable, user-friendly control interface requirement
Solutions Implemented
- Automated obstacle-avoidance via ultrasonic sensors
- Manual override via Bluetooth with compass orientation
- Dual Bluetooth modules — motors and sensors separated
- PID controller to correct motor bias drift
Key Contributions & Outcomes
- Built custom Python interface for real-time sensor data visualization during operation
- Designed a single-servo "X"-shaped gripper arm for reliable block pick-up and delivery
- Reduced chassis footprint through layout iteration to improve maneuverability in tight maze corridors
- Implemented dual Bluetooth module architecture — one for motor commands, one for sensor telemetry
- Used compass orientation for heading reference during manual and semi-autonomous modes
- Successfully completed the full maze task — navigate, localize, pick up block, deliver — in 4 minutes 18 seconds
- Integrated mechanical, electrical, and software systems into a reliable, testable platform
Technical Approach
PID Correction & Hybrid Control
The drivetrain used a differential-drive configuration with a PID controller
to counteract motor bias — a common issue in dual-motor systems where slight torque asymmetry
causes the robot to drift off course. The controller read encoder feedback and applied
differential corrections at each control loop tick.
Two Bluetooth modules were used to separate motor command traffic from sensor
telemetry — preventing packet collisions that would corrupt time-sensitive obstacle readings.
A custom Python GUI on the operator's laptop visualized live sensor data, giving
the operator situational awareness for manual override decisions.
The "X"-shaped gripper used a single servo to open and close four arms
simultaneously — a mechanically elegant solution that minimized weight, wiring complexity,
and potential failure points compared to a multi-servo design.
// PID motor bias correction
float error = targetHeading - compassReading;
float correction = Kp * error + Kd * (error - prevError);
setMotors(BASE_SPEED + correction, BASE_SPEED - correction);
prevError = error;