04 // Robotics
Electrical Team — Rovers for Space Exploration
U of T Engineering Design Team · 2022 – 2024
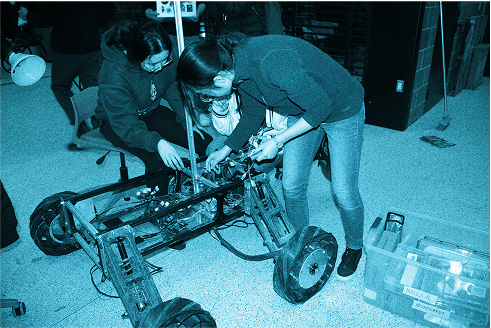
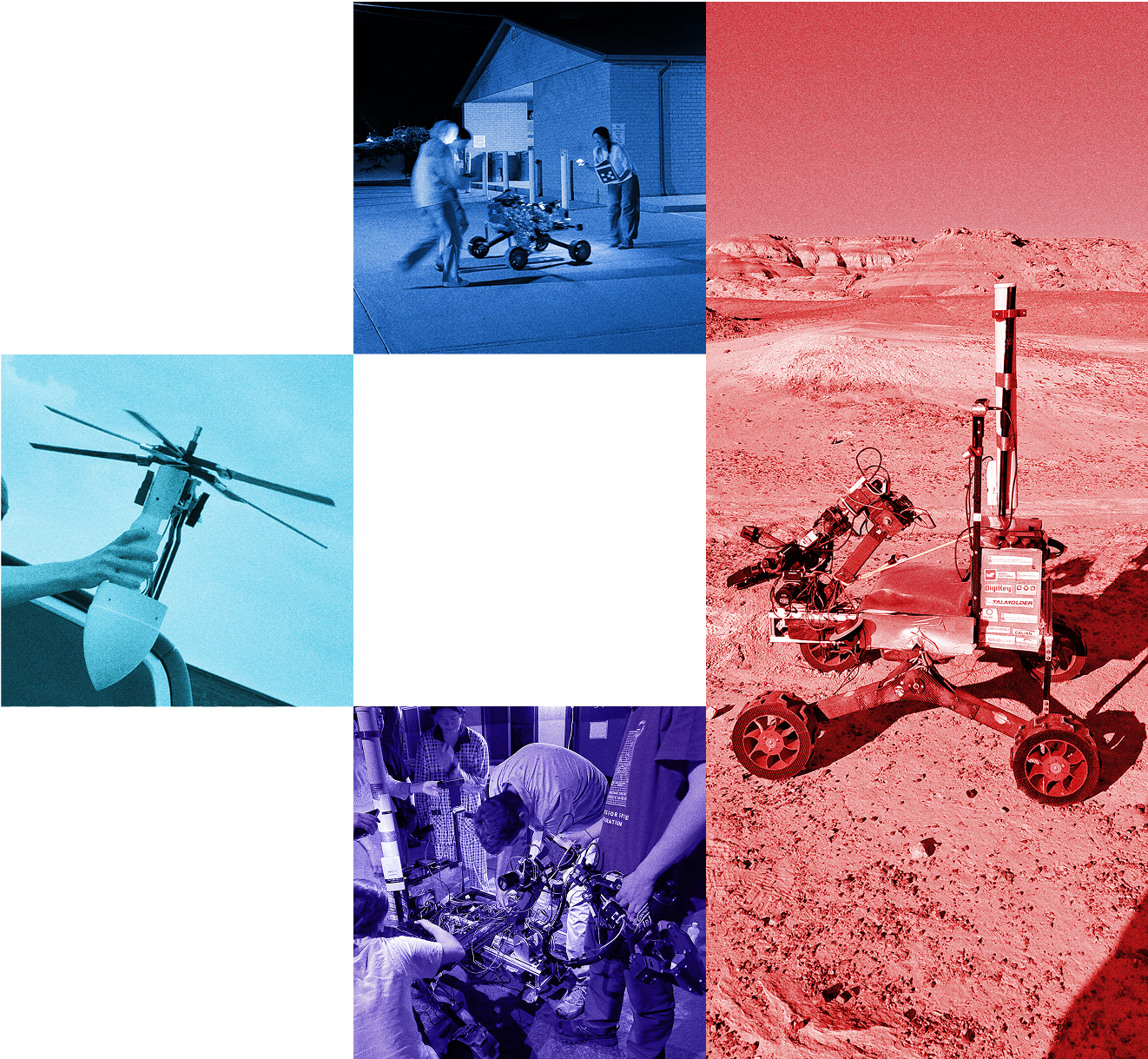
As part of U of T's Rovers for Space Exploration (RSX) electrical team, I contributed to designing the onboard electronics for a multi-terrain rover competing in the Canadian International Rover Challenge (CIRC) — a rigorous competition simulating real Mars surface operations.
My focus was on compact PCB layout design, pushing miniaturization limits to reduce the board footprint while maintaining robust performance in harsh outdoor conditions — vibration, dust, temperature swings, and electromagnetic interference from co-located motor drivers.
PCB layout for robotics requires balancing competing constraints: minimizing size, managing heat from high-current motor drive components, and ensuring analog sensor signals are not corrupted by nearby switching noise. I used dedicated ground plane regions for analog vs digital circuitry, poured copper thermal slugs under high-dissipation ICs, and routed all high-frequency traces with matched impedance and minimal stub lengths.
Communication subsystems — including CAN bus and UART links between boards — were routed as differential pairs with controlled spacing. Power distribution networks were decoupled at each board entry with LC filters to reject conducted EMI from the motor controllers. These techniques ensured reliable sensor telemetry and actuation commands even during peak motor load.